 The current research focus of the Intelligent Control and Estimation of Things (ICE-T) Lab is on the control, estimation, identification and analysis of robotic, autonomous and cyber-physical systems (CPS) under real-world uncertainties. CPS are broadly characterized as networked computational elements that control physical components; they form the basis of our future smart systems, ranging from traffic flow management to personalized health care to electric power generation and distribution. A central theme of our research is harnessing the rich dynamical behavior of mixed continuous and discrete (i.e., hybrid) system dynamics to describe and analyze the complex behaviors and interactions of such systems, as well as the changes in their environment, intentional or otherwise. Our research contributes foundational understanding of the control and estimation of these smart systems that opens up new opportunities for creating and improving their safety, functionality and efficiency, with a beneficial impact on our society and economy.
The current research focus of the Intelligent Control and Estimation of Things (ICE-T) Lab is on the control, estimation, identification and analysis of robotic, autonomous and cyber-physical systems (CPS) under real-world uncertainties. CPS are broadly characterized as networked computational elements that control physical components; they form the basis of our future smart systems, ranging from traffic flow management to personalized health care to electric power generation and distribution. A central theme of our research is harnessing the rich dynamical behavior of mixed continuous and discrete (i.e., hybrid) system dynamics to describe and analyze the complex behaviors and interactions of such systems, as well as the changes in their environment, intentional or otherwise. Our research contributes foundational understanding of the control and estimation of these smart systems that opens up new opportunities for creating and improving their safety, functionality and efficiency, with a beneficial impact on our society and economy.
The following major technology trends and key research areas serve as motivators for our current and future research:
Autonomous multi-agent systems with imperfect information and uncertainties
This challenge is largely driven by the proliferation of interacting, but locally controlled, autonomous systems such as self-driving cars and robots in shared human-robot workspaces, that have limited or non-existent capabilities for communicating intentions and decisions to other autonomous systems and people that share the same environment, while subjected to various sources of modeling and observation uncertainties. We are interested in how an autonomous agent can communicate and infer intentions and decisions with the ultimate goal of improving system performance and safety.
Safety, reliance, robustness and resiliency
of smart and autonomous systems
Recently, there has been a growing concern for the reliance and security of critical infrastructures, such as the transportation system or the U.S. power grid, as most of these systems are safety-critical and subject to malicious attacks or unforeseen faults. Of particular interest for my work is the safety, reliance, robustness and resilience of these systems, in terms of preserving the integrity and availability of these systems despite attacks and faults, as well as the recovery from such incidents.
Current Projects:
- MATLAB/Simulink Toolbox Development for Simultaneous Input and State Estimation (Sponsor: MathWorks, Role: Sole PI)
- Distributed Coordination of Autonomous Swarms with Limited or Absent Communication and Intermittent Data (Sponsor: ONR, Role: Sole PI, 2023 ONR YIP Award)
- Smart User-Effective Data-Enabled (SUEDE) Shoe for Ankle Injury Prevention (Sponsor: NIH of Arthritis & Musculoskeletal & Skin Diseases (R01); Role: Co-I)
- Coordinated Multi-Robot-Chain for Terrain Estimation and Exploration (Sponsor: NASA, Role: Sole PI, 2020 NASA Early Career Faculty Award)
- Towards Non-Conservative Learning-Aided Robustness for Cyber-Physical Safety and Security (Sponsor: NSF, Role: Sole PI, 2020 NSF CAREER Award)
Our current research is motivated by applications of autonomous multi-agent systems, intelligent robots and cyber-physical systems reliability and safety. Our approach to research is both application-driven and grounded in theory. Our research often leveraging techniques from various research fields such as control and estimation theory, optimization algorithms, statistics, etc. At the moment, our research focus is on set-based correct-by-synthesis controller and estimator designs with robustness, safety and performance guarantees.
Concluded Projects:
- Identification and Estimation of Swarm Intent via Partitions of System Dynamics (Sponsor: DARPA, Role: Sole PI, 2018 DARPA Young Faculty Award)
- Control and Estimation for Provably Safe Interactive Driver Assistance (Sponsor: Toyota Research Institute, Role: ASU PI)
- Communicationless Coordination via Intent Estimation and Intent- Expressive Motion Planning in Multiagent Exploration (Sponsor: NASA STTR; SB Collaborator: Geisel Software, Inc., Role: ASU PI)
- Data-Driven Modeling and Preview-Based Control for Cyber-Physical System Safety (Sponsor: NSF, Role: NU PI)
- User-Adaptive and Safe Control of a Wearable Upper-Extremity Exoskeleton Robot (Sponsor: NSF, Role: Co-PI)
Broader Impacts:
Societal Impact: Autonomous systems, including self-driving vehicles, smart grids, smart homes, service robots, etc., can benefit the society by making us safer, more comfortable and more efficient in our everyday tasks. Our research will also create new educational opportunities and will prepare the next generation of researchers and practitioners with interdisciplinary research and thinking skills.
Technological Impact: Our research products will be easily adaptable to general cyber-physical systems applications beyond the ones considered in our projects, and they will provide research and development engineers with tools for maintaining system safety and security,
Control Synthesis with Provable Safety Guarantees under Real-World Uncertainties
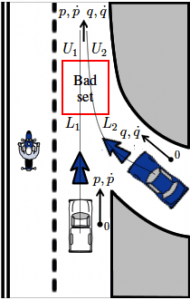
 Rather than waiting until safety constraint boundaries are reached, which is often too late, potential violations need to be anticipated based system dynamics. Thus, the literature often expresses safety objectives in terms of the set of all inputs that do not jeopardize forward invariance of a given set. The boundary of this safe controlled invariant set serves to separate provably safe states from bad states (e.g., where vehicle collision is probable/imminent), while the set of safe inputs can be used to either supervise human inputs or for autonomously controlling the system to guarantee safety. This concept of safety control will also play a huge role in ensuring the safety of wearable shoulder exoskeletons and for guaranteeing safety of self-driving cars despite uncertainties in modeling and measurements.
Rather than waiting until safety constraint boundaries are reached, which is often too late, potential violations need to be anticipated based system dynamics. Thus, the literature often expresses safety objectives in terms of the set of all inputs that do not jeopardize forward invariance of a given set. The boundary of this safe controlled invariant set serves to separate provably safe states from bad states (e.g., where vehicle collision is probable/imminent), while the set of safe inputs can be used to either supervise human inputs or for autonomously controlling the system to guarantee safety. This concept of safety control will also play a huge role in ensuring the safety of wearable shoulder exoskeletons and for guaranteeing safety of self-driving cars despite uncertainties in modeling and measurements.
In our research, we successfully combined ideas from safety control with intention estimation of other drivers in various driving scenarios to improve the performance of driver-assist systems. Moreover, we extended the conventional definition of control barrier functions (an important safety control tool) to allow them to be control-dependent and designed corresponding controllers that can enforce the control-dependent control barrier functions, which we demonstrated using a vehicle stability example with over-actuated vehicles.
Algorithms for Affine Abstraction of Nonlinear Dynamics
 Motivated by the difficulties that are typically associated with controller and estimator designs for complex systems with nonlinear (and hybrid) dynamics, our research investigates and introduces novel techniques for a principled simplifying approach known as abstraction. Abstraction is a procedure to approximate the complex system dynamics by simpler models that “include” all possible trajectories of the original system. As such, controller and estimator designs for these simplified abstraction models can yield certain desired properties for the original system such as safety or general constraints satisfaction. This research has the potential to affect many smart and autonomous applications, including for swarm intent identification or classification, where the intent models are nonlinear.
Motivated by the difficulties that are typically associated with controller and estimator designs for complex systems with nonlinear (and hybrid) dynamics, our research investigates and introduces novel techniques for a principled simplifying approach known as abstraction. Abstraction is a procedure to approximate the complex system dynamics by simpler models that “include” all possible trajectories of the original system. As such, controller and estimator designs for these simplified abstraction models can yield certain desired properties for the original system such as safety or general constraints satisfaction. This research has the potential to affect many smart and autonomous applications, including for swarm intent identification or classification, where the intent models are nonlinear.
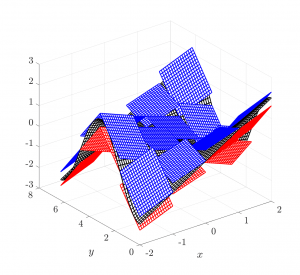
Specifically, we designed computational algorithms that automate this abstraction process to obtain affine abstractions, i.e., abstraction models where the original complex dynamics are bracketed by a pair of hyperplanes. When the models are known, we have developed several tractable affine abstraction algorithms for various classes of nonlinear dynamics, including uncertain, continuous nonlinear dynamics. Moreover, since the space complexity of these algorithms may be high for high-dimensional systems, we have recently also developed an incremental version of these algorithms that can allow us to deal with higher dimensional systems at the cost of additional computational time and slight suboptimality. On the other hand, when, instead of known mathematical models, only prior noisy sampled data of the systems are available, our recent research also designed a data-driven approach to obtain affine abstraction models.
Bounded-Error State Estimation with Missing and Delayed Data
 Controller and estimator design techniques often rely on the common assumption that regularly sampled sensor measurements arereliably available. However, as systems become increasingly integrated and distributed, such access to sensory data can no longer be taken for granted in the control and decision-making loops of the system. To address this issue, we consider the effect of missing and delayed data, e.g., due to occlusion, communication network congestion or denial of service attacks, on the accuracy of state estimators.
Controller and estimator design techniques often rely on the common assumption that regularly sampled sensor measurements arereliably available. However, as systems become increasingly integrated and distributed, such access to sensory data can no longer be taken for granted in the control and decision-making loops of the system. To address this issue, we consider the effect of missing and delayed data, e.g., due to occlusion, communication network congestion or denial of service attacks, on the accuracy of state estimators.
Specifically, we designed bounded-error state observers with accuracy guarantees that are robust to missing and delayed data patterns. Instead of assuming probabilistic missing or delay events, we consider the set of all possible missing or delayed data patterns expressed by a fixed-length language, and develop state observer with guaranteed accuracy using finite-time optimal control approaches. This guaranteed accuracy is crucial for safety-critical systems including driver-assist systems in our research projects. Moreover, the same framework can be used for constrained control problems with guaranteed tracking error accuracy.
Set-Valued Mode, Input and State Estimation
 Smart, autonomous and cyber-physical systems are often exposed to cyber vulnerabilities. Such systems, which include the power grid, autonomous vehicles, medical devices, and so on, are usually safety-critical and if compromised or malfunctioning, can cause serious harm to the controlled physical entities and the people operating or utilizing them. Thus, our research investigates the problem of attack-resilient set-valued estimation, i.e., to reliably estimate the true system states despite malicious attacks in the presence of bounded-norm noise. In particular, we developed optimal algorithms that are resilient against attacks on switching mechanisms as well as false data injection attacks on actuator and sensor signals. Unlike most existing methods in the literature, our approach using the framework of the more general simultaneous mode, input and state estimation problem that also has applications in target tracking and fault detection. This work also lays the foundation for state estimation under modeling uncertainty.
Smart, autonomous and cyber-physical systems are often exposed to cyber vulnerabilities. Such systems, which include the power grid, autonomous vehicles, medical devices, and so on, are usually safety-critical and if compromised or malfunctioning, can cause serious harm to the controlled physical entities and the people operating or utilizing them. Thus, our research investigates the problem of attack-resilient set-valued estimation, i.e., to reliably estimate the true system states despite malicious attacks in the presence of bounded-norm noise. In particular, we developed optimal algorithms that are resilient against attacks on switching mechanisms as well as false data injection attacks on actuator and sensor signals. Unlike most existing methods in the literature, our approach using the framework of the more general simultaneous mode, input and state estimation problem that also has applications in target tracking and fault detection. This work also lays the foundation for state estimation under modeling uncertainty.
.
Model Invalidation and Active Model Discrimination Algorithms
 In simple terms, model invalidation (MI) algorithms have the objective of determining whether members of a set of models are consistent with observed experimental data. On the other hand, active model discrimination (AMD) algorithms design/synthesize the control inputs of a dynamical system such that all models in the model set are sufficiently different from each other, to complement the MI algorithms’ goals of determining the true model. This research has many applications, including for system identification and fault detection. In particular, our research applies the developed algorithms to intent identification of swarm formation models and autonomous driving scenarios.
In simple terms, model invalidation (MI) algorithms have the objective of determining whether members of a set of models are consistent with observed experimental data. On the other hand, active model discrimination (AMD) algorithms design/synthesize the control inputs of a dynamical system such that all models in the model set are sufficiently different from each other, to complement the MI algorithms’ goals of determining the true model. This research has many applications, including for system identification and fault detection. In particular, our research applies the developed algorithms to intent identification of swarm formation models and autonomous driving scenarios.
Our research on MI algorithms, when combined with the results from affine abstraction, has significantly extended the class of systems to which these algorithms apply to, including when the mathematical models are notavailable. Similarly, we designed some of the first tractable AMD algorithms that can incorporate more realistic and complex system dynamics and constraints as well as output feedback-based optimal input designs.
Control and Estimation for Provably Safe Interactive Driver Assistance
Collaborator(s): Dr. Necmiye Ozay, Dr. Dimitra Panagou, Dr. Qiang Shen
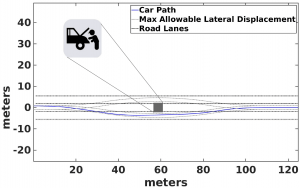
This project will investigate parallel autonomy to improve vehicle safety. We propose to develop tools for obtaining provably-correct safety barriers offline, and methods for using them online in order to interact with and assist the human driver. We propose a contract-based modular design approach for computation of these safety barriers. The main technical novelties include: (i) incorporating sensing/perception capabilities, captured by a contract, as well as multi-vehicle interactions while computing safety barriers, (ii) integrating estimation to identify valid, less conservative safety barriers online, and (iii) providing principled means to evaluate trade-offs between sensing/perception/estimation uncertainty and safety using multi-scale dynamic models. As a side benefit, interactive displays of safety barriers, e.g., via a speedometer with colored indicators similar to a temperature gauge, can make drivers aware of the shared control and the safety margin of their actions.
Optimal Input Design for Model Discrimination with Rational Agents
Collaborator(s): Prof. Necmiye Ozay, Prof. Qiang Shen, Dr. Farshad Harirchi, Ruochen Niu, Emil Jacobsen
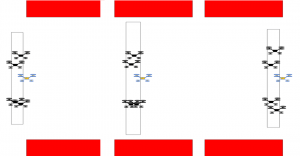
 In this project, we consider the problem of active model discrimination amongst a finite number of affine models with uncontrolled and noise inputs, each representing a different system operating mode that corresponds to an unobserved intent of another vehicle/robot, or to a fault type or an attack strategy, etc. The active model discrimination problem aims to find optimal separating inputs that guarantee that the outputs of all the affine models cannot be identical over a finite horizon.
In this project, we consider the problem of active model discrimination amongst a finite number of affine models with uncontrolled and noise inputs, each representing a different system operating mode that corresponds to an unobserved intent of another vehicle/robot, or to a fault type or an attack strategy, etc. The active model discrimination problem aims to find optimal separating inputs that guarantee that the outputs of all the affine models cannot be identical over a finite horizon.
The model-based optimization method we developed can be applied to identify the intention of other drivers at intersections by taking appropriate control actions while simultaneously optimizing for safety, comfort and energy efficiency (intention identification), as well as to enable a system operator to detect and uniquely identify potential faults or attacks (cyber-physical systems security). [ICCPS’18] [arXiv’17] [IFAC’17]
Guaranteed Fault Detection and Isolation with Model Invalidation
Collaborator(s): Prof. Necmiye Ozay, Dr. Farshad Harirchi
In this project, we develop novel optimization-based formulations for fault detection and isolation of switched affine systems using a model invalidation framework. In addition, we introduce a measure of separation between the system and fault models, which offers a practical method for finding the smallest receding time horizon and the maximum allowed noise such that fault detection and isolation is guaranteed. [CDC’17]
Resilient State Estimation with Robustness
Collaborator(s): Prof. Emilio Frazzoli, Prof. Minghui Zhu, Ming Qing Foo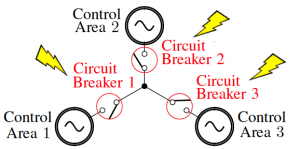
We consider the problem of attack-resilient state estimation, that is to reliably estimate the true system states despite two classes of malicious attacks: (i) attacks on the switching mechanisms and (ii) false data injection attacks on actuator and sensor signals, in the presence of unbounded stochastic process and measurement noise signals. Moreover, we characterize fundamental limitations to resilient estimation (e.g., upper bound on the number of tolerable signal attacks) and discuss the topics of attack detection, identification and mitigation.
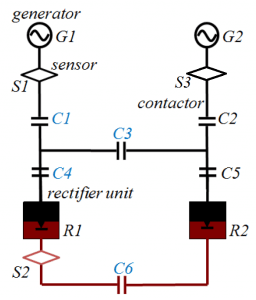
In addition, we propose a state estimation algorithm that is also robust to additive and multiplicative modeling errors, by leveraging principles of robust optimization. The effectiveness of our estimator is demonstrated in simulations of an IEEE 14-bus electric power system. [ACC’18] [TCPS’18*] [SIAM’18*] [ACC’16] [CDC’15] [CDC’14]
Hidden Mode Tracking Control with Input Constraints
Collaborator(s): Dr. Emilio Frazzoli, Aurora Flight Sciences
 A typical control strategy of hidden mode hybrid systems has been to conservatively execute a control scheme while waiting until the mode estimate is sufficiently trustworthy. However, the wait time for the estimate to converge may cause unnecessary delays, assuming that the estimate converges in the first place. In my thesis work, I developed a hidden mode control law using Adaptive and Sliding Mode Control techniques that tracks a hybrid reference trajectory, without requiring the convergence of the mode estimate to its true value. In addition, control inputs to these systems are constrained in most practical applications due to physical limitations of actuators or by choice to avoid input chattering that can excite unmodeled dynamics and cause plant damage. To address this challenge, I proposed a set of novel control designs utilizing the tools of Adaptive and Robust Control that modifies both the nominal control law and the open-loop reference model. These strategic modifications ensure system stability when the reference is infeasible and handle the challenges of control input amplitude and rate constraints as well as changing dynamics due to mode switching.
A typical control strategy of hidden mode hybrid systems has been to conservatively execute a control scheme while waiting until the mode estimate is sufficiently trustworthy. However, the wait time for the estimate to converge may cause unnecessary delays, assuming that the estimate converges in the first place. In my thesis work, I developed a hidden mode control law using Adaptive and Sliding Mode Control techniques that tracks a hybrid reference trajectory, without requiring the convergence of the mode estimate to its true value. In addition, control inputs to these systems are constrained in most practical applications due to physical limitations of actuators or by choice to avoid input chattering that can excite unmodeled dynamics and cause plant damage. To address this challenge, I proposed a set of novel control designs utilizing the tools of Adaptive and Robust Control that modifies both the nominal control law and the open-loop reference model. These strategic modifications ensure system stability when the reference is infeasible and handle the challenges of control input amplitude and rate constraints as well as changing dynamics due to mode switching.
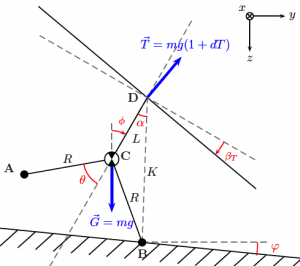
To successfully land a helicopter on a sloped terrain in a dynamic manner, I chose a framework which includes both planning and tracking. First, a desired behavior profile or plan that is not necessarily feasible needs to be specified or generated as an open-loop reference model, e.g., with sampling-based motion planning techniques. Then, by modeling the imperfect knowledge of ground contact as an unknown hidden mode, the hidden mode tracking control design can be applied. This planning and tracking approach has also been successfully applied to other systems such as a toddler robot and a car with automatic transmission. [CDC’16] [CDC’14] [ACC’13]
Hidden Mode Estimation
Collaborator(s): Dr. Emilio Frazzoli, Dr. Minghui Zhu, Dr. Domitilla Del Vecchio
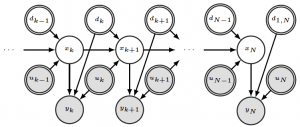
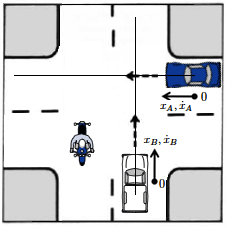 While the filtering problem of hidden mode hybrid systems without unknown inputs have been widely studied for target tracking applications, its solution approaches are not applicable because oftentimes, the disturbance inputs, e.g. the decision of other vehicles,cannot be modeled as a zero-mean, Gaussian white noise. This additional input uncertainty gives rise to a need for an extension of existing algorithms to hidden mode hybrid systems with unknown inputs. Thus, I proposed efficient algorithms for estimating the hidden mode and the unknown inputs of a system. My approach makes effective use of Multiple-Model Estimation, Statistics and Information Theory. Intuitively, using a bank of state and input filters, the hidden mode can be estimated based on which of the generalized innovations is the most likely to be white. The resulting mode estimator is shown to be consistent, i.e., the mode estimate converges asymptotically to the model that is ‘closest’ to the true model in an information-theoretic sense (with minimum Kullback-Leibler (KL) divergence). This estimation approach solves the intention inference problem described above for collision avoidance at road intersections. [SIAM’16*] [CDC’15] [CDC’14]
While the filtering problem of hidden mode hybrid systems without unknown inputs have been widely studied for target tracking applications, its solution approaches are not applicable because oftentimes, the disturbance inputs, e.g. the decision of other vehicles,cannot be modeled as a zero-mean, Gaussian white noise. This additional input uncertainty gives rise to a need for an extension of existing algorithms to hidden mode hybrid systems with unknown inputs. Thus, I proposed efficient algorithms for estimating the hidden mode and the unknown inputs of a system. My approach makes effective use of Multiple-Model Estimation, Statistics and Information Theory. Intuitively, using a bank of state and input filters, the hidden mode can be estimated based on which of the generalized innovations is the most likely to be white. The resulting mode estimator is shown to be consistent, i.e., the mode estimate converges asymptotically to the model that is ‘closest’ to the true model in an information-theoretic sense (with minimum Kullback-Leibler (KL) divergence). This estimation approach solves the intention inference problem described above for collision avoidance at road intersections. [SIAM’16*] [CDC’15] [CDC’14]
Optimal and Stable Simultaneous State and Input Estimation
Collaborator(s): Dr. Emilio Frazzoli, Dr. Minghui Zhu
 In developing a hidden mode estimator for stochastic hybrid systems with unknown inputs, I also more deeply explored the subject of simultaneous state and input estimation, previously considered for only restrictive classes of linear systems. This problem itself is an extension of Kalman filtering and similarly has relevance for a wide range of disciplines, e.g., meteorology, oceanography and fault identification. In addition to developing state and input estimators for a more general class of linear systems, I provided technical guarantees for the optimality and stability of these filters. More importantly, I found a connection between the conditions for the existence and stability of the estimator and a system property known as strong detectability. This establishes the missing link between filter design and system characteristics. [Automatica’16] [CDC’15b] [CDC’15c] [ACC’15] [CDC’14b] [arXiv’13] [CDC’13]
In developing a hidden mode estimator for stochastic hybrid systems with unknown inputs, I also more deeply explored the subject of simultaneous state and input estimation, previously considered for only restrictive classes of linear systems. This problem itself is an extension of Kalman filtering and similarly has relevance for a wide range of disciplines, e.g., meteorology, oceanography and fault identification. In addition to developing state and input estimators for a more general class of linear systems, I provided technical guarantees for the optimality and stability of these filters. More importantly, I found a connection between the conditions for the existence and stability of the estimator and a system property known as strong detectability. This establishes the missing link between filter design and system characteristics. [Automatica’16] [CDC’15b] [CDC’15c] [ACC’15] [CDC’14b] [arXiv’13] [CDC’13]
Flatness-based Tracking of Discrete-Time Systems
Collaborator(s): Dr. Emilio Frazzoli, Dr. Brian Paden
My recent work demonstrates the equivalence of the flatness property of a system to an estimation-theoretic property known as strong observability, hence providing an alternative characterization of such systems and supplying computational tools for finding flat outputs. In particular, I utilized a causal variant of flat outputs for linear discrete-time systems, known as backward difference flat outputs, to develop a novel causal flatness-based tracking control, with applications to many mechanical and robotic systems. [ACC’15b] [ACC’15c]
 Stochastically Parametric Ordered Differential Games
Stochastically Parametric Ordered Differential Games
Collaborator(s): Dr. Emilio Frazzoli, Dr. Minghui Zhu, Dr. Erich Mueller
For urban transportation, typical collision avoidance solutions assume the worst case scenario, which in many cases, lead to a halt. Instead, if we take into account a stochastic model that represents the probability of the upper bound on the inputs of other car drivers, the conservativeness and performance of the collision avoidance solution can be balanced. Thus, in collaboration with my colleagues, I developed numerical computation algorithms for ordered differential games that led to a decreased expected travel time. [IROS’13]
.
Optimal Control of a Dubins Vehicle on Heterogeneous Terrains
Collaborator(s): Dr. Emilio Frazzoli, Dr. Ricardo Sanfelice
 To understand how cars should navigate a terrain with different surface characteristics in an optimal manner, recent principles of optimality for hybrid systems can be utilized. My goal was to characterize the nature of optimal paths for Dubins vehicles when crossing boundaries of a heterogeneous terrain. Among the characteristics of an optimal Dubins path across boundaries of a heterogeneous terrain, I contributed to the discovery of a ‘refraction’ law at the boundaries that generalizes Snell’s law of refraction in optics to paths with bounded curvature. [Automatica’14] [arXiv’14]
To understand how cars should navigate a terrain with different surface characteristics in an optimal manner, recent principles of optimality for hybrid systems can be utilized. My goal was to characterize the nature of optimal paths for Dubins vehicles when crossing boundaries of a heterogeneous terrain. Among the characteristics of an optimal Dubins path across boundaries of a heterogeneous terrain, I contributed to the discovery of a ‘refraction’ law at the boundaries that generalizes Snell’s law of refraction in optics to paths with bounded curvature. [Automatica’14] [arXiv’14]
.
Submodular Optimization for Discrete State Estimation and Optimal Sensor Scheduling
Collaborator(s): Dr. Necmiye Ozay, Lingyun Gao, Dr. Prince Singh
 We study adaptive decision-making problems for stochastic state estimation and optimal sensor scheduling. The objective is to design a policy that can adaptively estimate the discrete state of a system (whether a system component is faulty) or the continuous state via Kalman filtering/smoothing by sequentially choosing actions and observing sensor measurements. This problem has many real-world applications in medical diagnosis and emergency response, electrical systems diagnosis, scheduling, etc.
We study adaptive decision-making problems for stochastic state estimation and optimal sensor scheduling. The objective is to design a policy that can adaptively estimate the discrete state of a system (whether a system component is faulty) or the continuous state via Kalman filtering/smoothing by sequentially choosing actions and observing sensor measurements. This problem has many real-world applications in medical diagnosis and emergency response, electrical systems diagnosis, scheduling, etc.
Finding optimal policies for stochastic estimation and sensor scheduling problems is often computationally intractable. Hence, we seek to find conditions under which these problems have provably near-optimal performance with a greedy policy that chooses the current best action. In the context of noisy stochastic state estimation, we introduced a novel diminishing returns property for set functions called weak adaptive submodularity that provides these desired conditions. Moreover, in our state estimation experiments with an aircraft electrical system plagued by persistent sensor faults, we observed that the greedy policy performs equally well as the best possible outcome. [ACC’18b] [ACC’17] [LCSS’17]
Neuromorphic/Bio-Inspired Control
Collaborator(s): Dr. Emilio Frazzoli, Dr. Prince Singh, Dr. Jean Gregoire, Dr. Andrea Censi
Our recent work studies the use of event-based bio-inspired/neuromorphic vision sensors for control. These sensors belong to a new class of sensors that output a low-latency stream of events, generated every time there is a change in the local brightness, rather than periodic frames. Since existing computer vision algorithms can only process periodic frames, a new class of control algorithms is needed to make use of these sensors. Thus far, we have considered the problem of stabilization and regulation of deterministic and stochastic continuous-time LTI systems, by drawing inspirations from the literature on control with limited information, quantized control and robust control. [TAC’18*] [ACC’17b] [CDC’16b] [ACC’17]